Human Merging Behaviour in a Coupled Driving Simulator: How do we resolve conflicts?
Welcome
This web page contains the supplementary material for the paper Human Merging Behaviour in a Coupled Driving Simulator: How do we resolve conflicts? by Olger Siebinga, Arkady Zgonnikov, and David A. Abbink. You can find the source code to reproduce the experiments and the plots on Github. You can find the data from the paper on the 4TU Data repository.
In all the plots below, you can click the legend to toggle elements in the plot. Other navigation tools (like zoom and reset view) can be found in the top right corner of every frame.
Who Merged First?
In 2D
In 3D
Velocity traces plot
The plots below show all velocity traces for all trials, sorted per condition. Left en right correspond to a single participant in a pair. Click on the legend entries to enable or disable specific traces.
Condition -4_-8
Condition -4_0
Condition -4_8
Condition -2_8
Condition 0_8
Condition 0_0
Condition 0_-8
Condition 2_-8
Condition 4_-8
Condition 4_0
Condition 4_8
Initial Actions
CRT over Conditions
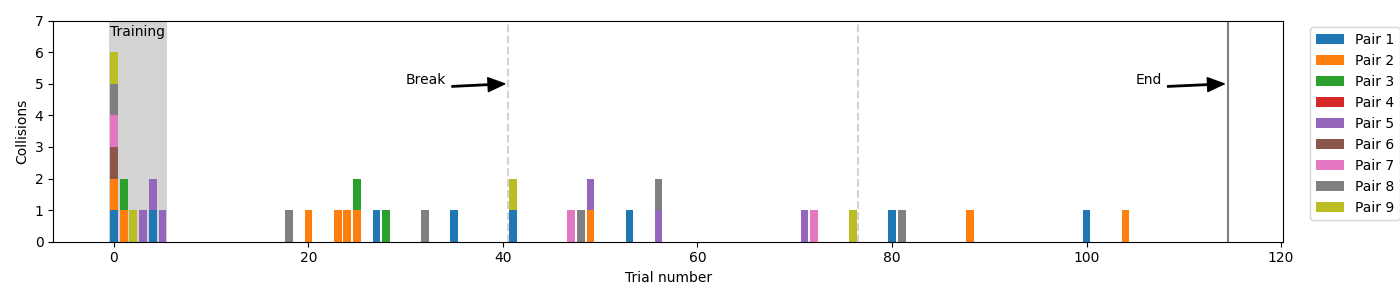
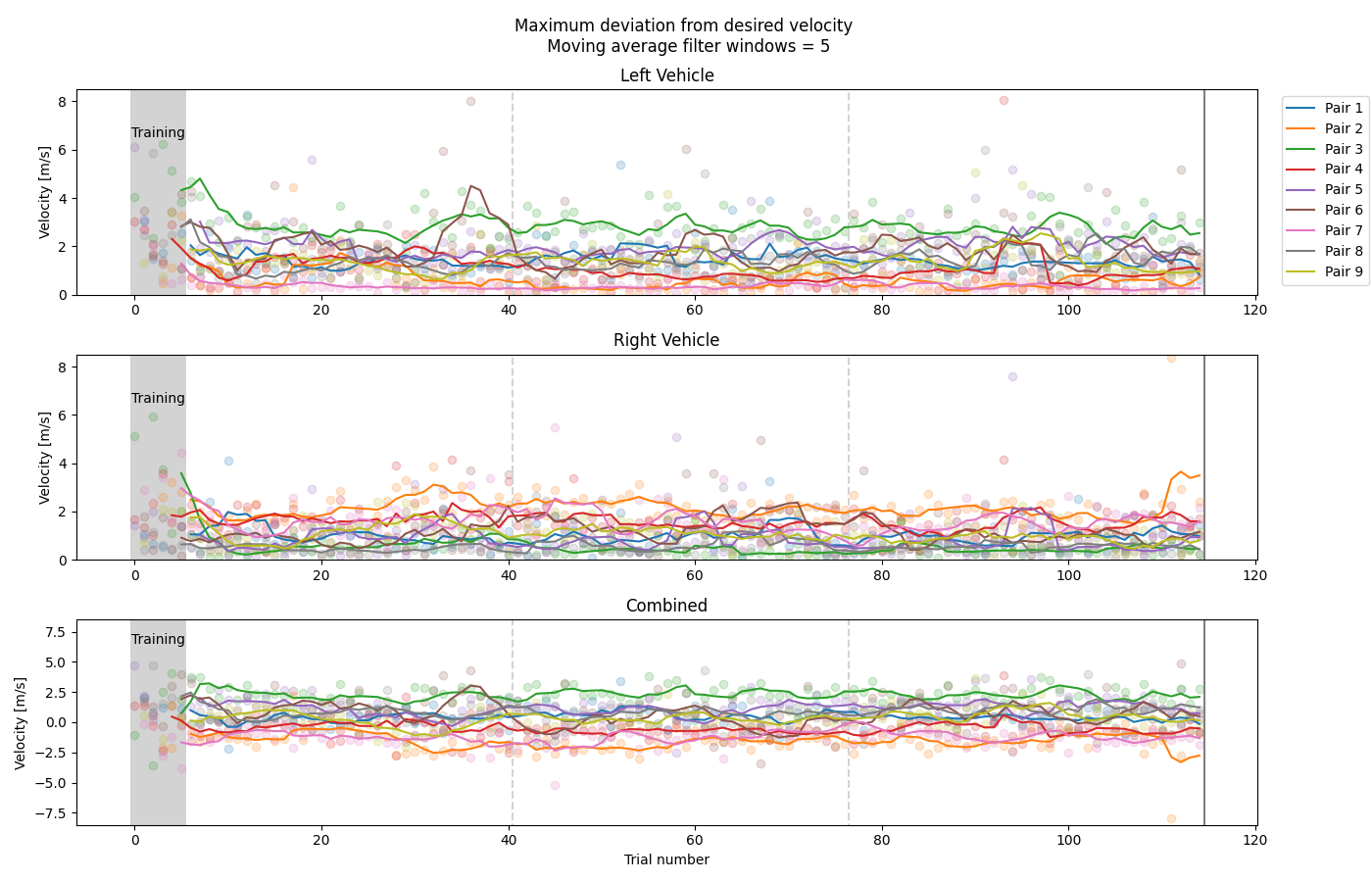
Learning effect during the experiment
To check if learning effect were present during the experiment, we investigated if the performance and effort of the drivers changes over the trials. For performance, we used the collisions as a metric, for effort we used the maximum deviation from the initial velocity. Based on the plot below, we concluded that there is no evidence that suggests leaning effects were present after the training phase.